C语言如何计算PID
用户关注问题
PID控制算法在C语言中是如何实现的?
我想了解在C语言编程中,如何写代码来实现PID控制算法?
在C语言中实现PID控制算法的步骤
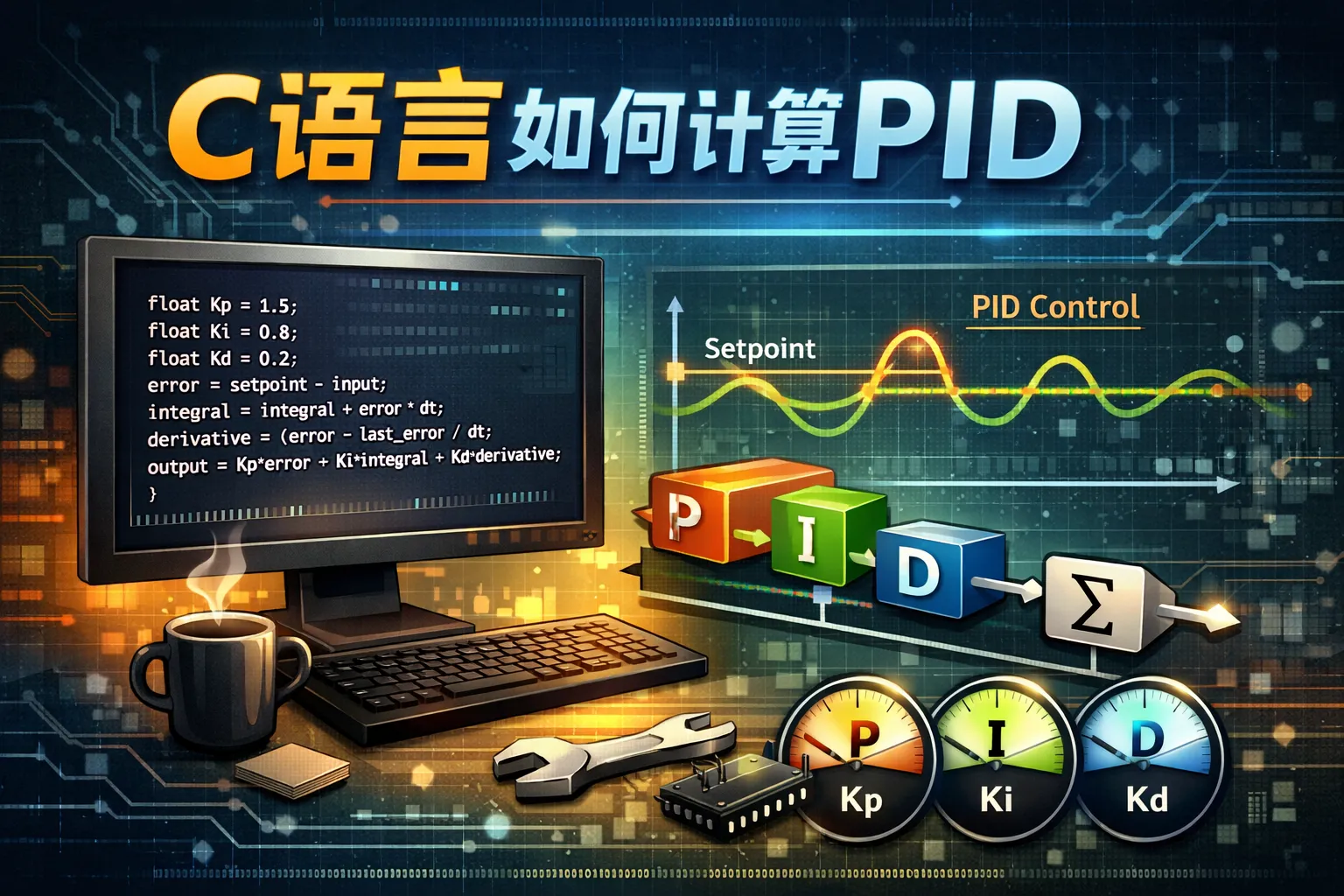
PID控制算法基于比例、积分、微分三部分对误差进行计算。需要定义变量保存误差当前值、历史误差值以及积分累计值。通过计算比例项(Kp乘以当前误差)、积分项(Ki乘以误差积分)和微分项(Kd乘以误差变化率),将三者相加得出控制输出。代码实现时,应注意变量初始化、更新误差值以及防止积分饱和等问题。
如何调节PID控制器中的参数?
在写C语言实现PID控制后,怎样调节控制器参数使其性能最佳?
调整PID参数以优化控制效果的方法
调节PID参数通常需要根据系统响应进行多次试验。比例系数(Kp)影响系统响应的快慢,积分系数(Ki)用于消除稳态误差,微分系数(Kd)则帮助减少系统过冲。开始时可设小值,然后观察系统响应曲线,根据超调量、响应时间和稳态误差逐步调整。常用的方法有Ziegler-Nichols调参法以及经验法调整,调节时要避免积分过饱和及振荡现象。
计算PID控制输出时需要注意哪些常见问题?
在使用C语言编程计算PID输出时,有哪些需要特别注意的地方?
编写PID控制代码时常见的问题和解决方案
一方面要确保误差计算正确且及时更新误差历史值。另一方面,积分项可能出现积分饱和,导致控制器输出异常,应对积分值进行限制。此外,微分项对噪声敏感,采样频率应匹配控制系统。浮点数运算误差和变量溢出也需要关注。实现时可以增加防止积分饱和的防护机制、使用滤波器减少噪声干扰,保证控制系统的稳定性。