











试想有一个可以弯曲和转动的机械臂,它的每个轴都配备了十分精准的电机驱动器、传感器或机器视觉,仿佛在演奏一曲运动交响乐。但如果没有“指挥”告诉系统的每个器件在何时该如何执行各自的操作,那么机械臂可能会发出刺耳的碰撞声和金属摩擦声。
在之前的实时控制系列文章中,我们探讨了用于感应、驱动和处理的实时控制 (RTC) 仪器。而要将它们贯穿起来需要借助“指挥”:实时通信。在本文中,我们将以基于实时通信和控制的工业 4.0 作为讨论的出发点。
受疫情影响,无人工干预的工厂运营模式广受欢迎。大数据(牛津词典将其定义为可以通过计算分析揭示模式、趋势和关联的超大数据集,特别是与人类行为和互动有关的数据集)的收集和适当分布可为数字孪生、计量、服务收费和预测性维护提供支持。例如,拥有可用的大数据能够监测机械臂的性能和系统运行状况,以及数据速率、温度、湿度、振动等,从而开发出能够基于使用大数据进行学习的 AI 预测未来性能和运行状况的模型(数字孪生)。要充分利用这些优势,有必要将信息技术 (IT) 和运营技术 (OT) 相结合,从而能够支持互联网协议 (IP) 以及 RTC 系统边缘。从逻辑上讲,这称为 IT 和 OT 融合。
在以太网中,开放系统互连 (OSI) 模型的网络层和传输层支持传输控制协议/互联网协议 (TCP/IP),因此以太网与生俱来地能够支持 IPv4(和 IPv6)。除此之外,还能确定地传输所需的信息量,这便是工业以太网正成为工业自动化融合领域中实质性通信标准的原因所在。由于现有基础设施通常使用两线协议,不支持本地 TCP/IP,因此传统现场总线目前仍用于与边缘器件的通信。图 1 展示了当前工业自动化领域的通信方式。
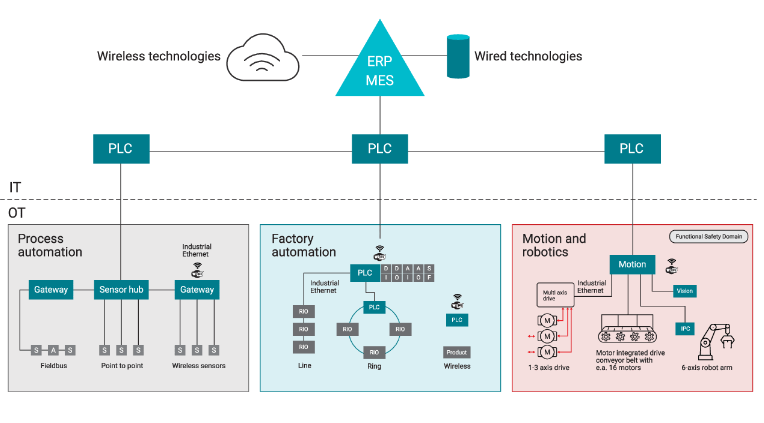
图 1:当前工业自动化领域的通信方式
工业通信的实现方式已经开始变革。单对以太网 (SPE) 可以维持现有的两线制系统架构,同时也可支持工业以太网的更快速度和诸多优势。先进的现场诊断支持分布式和集中式监测和操作。当然,SPE 能够重复使用由多个现有现场总线建立的现有两线制基础设施,从而简化融合驱动的升级并充分降低成本。
虽然以太网在企业应用中是开放且无处不在的,但目前还不能应用于实时应用,原因在于 IT 以太网帧的传输是“尽力而为”并且不受管控;任何情况下,出现错误都是令人厌烦的。对于实时 OT 来说,错误会造成严重后果甚至带来危险。RTC 系统需要以可靠的通信作为系统的“指挥”,确保系统按预期运行,从而避免产品故障或者造成系统损坏或人员伤害。由于 IT 以太网通常用于企业或消费类环境,因此很少遇到环境方面的挑战。与之相反,RTC 系统往往处于恶劣的环境中。
对稳健、确定性行为(例如在宽温度范围、噪声和脏污环境中的可靠性)以及更高数据速率的需求推动了工业以太网的应运而生。工业以太网确定且稳健,能够提供额外的带宽和固有的 IP 连接来充分利用 RTC 系统。
下面我们来了解一下时序特性及其如何应用于以太网物理层 (PHY)。
RTC 系统中有三大重要时序特性:
延迟。在这种背景下,需要考虑延迟,比如传播延迟:即从数据进入系统、子系统或子系统组件直至离开的时间长度。举例来说,TI 的 DP83826E 10Mbps/100Mbps 以太网 PHY 具有 208ns 的往返延迟。更低的延迟能够缩短周期时间或增加总线上的节点。
确定性。如果每次数据通过系统时的到达时间变化很大,那么延迟有多低都无关紧要。这种到达时间的变化即为确定性。抖动较低代表确定性良好。低确定性意味着您需要在系统中构建更少的余量来适应不断变化的延迟。图 2 展示了 DP83826E 的延迟 (208ns) 和确定性 (2ns)。实时以太网协议(如 EtherCAT)可以利用以太网 PHY 较低且确定性的延迟特性。
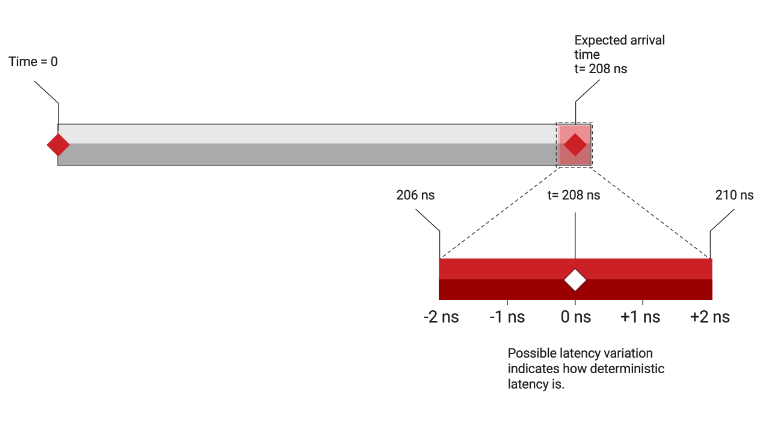
图 2:延迟及其确定性
同步。将整个系统或几个完整系统的时序绑定在一起也具有一定优势。为了能够更大限度地提高效率和吞吐量,同时确保安全操作,不同的子系统可能需要确切地“知道”另一个子系统何时执行某个操作。工业以太网协议全部支持某种同步。时间敏感型网络 (TSN) 便是适用于 RTC 系统的时间同步示例。电气和电子工程师学会 (IEEE) 1588v2,即精确时间协议 (PTP) 可帮助多个器件保持彼此间同步。IEEE 802.1as,也称为广义 PTP (gPTP),能够进一步推动 RTC 等时间敏感型应用的同步。
成功的 RTC 和通信部署是工业 4.0 的基石。但是又不止是实现工业 4.0,借助确定性、同步和低延迟的通信 PHY 及工业以太网协议,所有仪器均能组合在一起,演奏一曲美妙的音乐。
文章来自:https://www.eet-china.com/







